
驯服原子钟晶振模块
1产品概述
 该模块主要由国产高精度GNSS授时定位芯片、微型铷原子钟、OCXO高稳晶振、精密时间计数器、稳压电源以及控制电路等组成。通过精密测控电路及算法,结合各电路模块的优势,输出高精度、高稳定度、低相噪的10MHz频率信号,输出准确稳定的1PPS信号。可单独通过北斗BDS或与GPS、Galileo系统多种组合获取高精度UTC定时信号,对本地时钟进行时间同步和频率驯服,当卫星信号不可用时,也可以自主运行,较长时间保持输出信号的准确度。可通过外部使能控制端主动控制时钟模块的工作模式—跟踪或保持,通过指示灯以及逻辑电平指示内部状态,通过串口输出模块运行信息。可以测量外部输入1PPS信号的时差。
该模块主要由国产高精度GNSS授时定位芯片、微型铷原子钟、OCXO高稳晶振、精密时间计数器、稳压电源以及控制电路等组成。通过精密测控电路及算法,结合各电路模块的优势,输出高精度、高稳定度、低相噪的10MHz频率信号,输出准确稳定的1PPS信号。可单独通过北斗BDS或与GPS、Galileo系统多种组合获取高精度UTC定时信号,对本地时钟进行时间同步和频率驯服,当卫星信号不可用时,也可以自主运行,较长时间保持输出信号的准确度。可通过外部使能控制端主动控制时钟模块的工作模式—跟踪或保持,通过指示灯以及逻辑电平指示内部状态,通过串口输出模块运行信息。可以测量外部输入1PPS信号的时差。
2主要特点
Ø 高稳定度
Ø 低相噪
Ø 老化率
Ø 开机快
Ø 重现性
Ø 体积小
Ø 环境适应性强
Ø 自主可控
3应用领域
Ø 对时间频率信号性能要求较高的小型化低功耗电子设备
Ø 精密时间测量系统
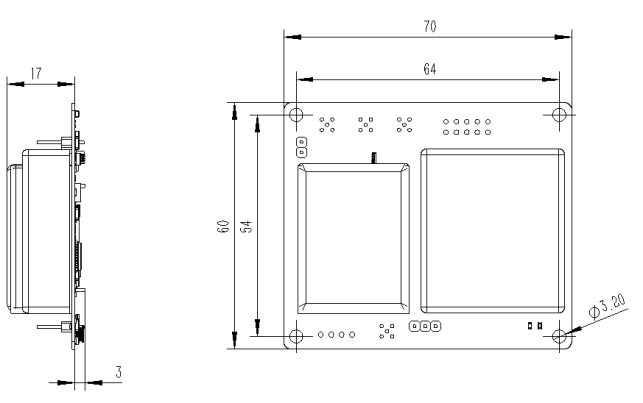
4 机械结构
5 原理框图
见图1。

图1 BTM-2511原理框图
6主要参数
|
GNSS模块 |
支持频率 |
BDS B1 GPS L1 GLONASS L1 Galileo E1-B/C |
|
|
1PPS精度RMS |
20ns(1σ) |
||
|
定位精度(CEP) |
水平 |
2.0m |
|
|
高程 |
3.5m |
||
|
输出信号 |
1PPS |
路数 |
1路 |
|
电平 |
3.3V CMOS |
||
|
脉宽 |
400μs(可定制其它) |
||
|
上升时间 |
<5ns |
||
|
10MHz |
路数 |
1路 |
|
|
波形 |
正弦波 |
||
|
负载 |
50Ω |
||
|
电平 |
6dBm±2dBm |
||
|
谐波抑制 |
-30dBc |
||
|
杂波抑制 |
-90dBc |
||
|
短稳 |
1E-12/s |
||
|
相噪 |
-110dBc/Hz @1Hz -135dBc/Hz @10Hz -145dBc/Hz @100Hz -150dBc/Hz @1kHz -155dBc/Hz @10kHz -160dBc/Hz @100kHz |
||
|
输入1PPS 时差测量 |
通道数 |
1路 |
|
|
测量范围 |
-0.5s~0.5s |
||
|
分辨率RMS |
20ps |
||
|
启动性能 |
GNSS冷启动时间 |
<30s |
|
|
原子钟锁定时间 |
<3min @25℃ |
||
|
OCXO晶振加热时间 |
<5min @25℃ |
||
|
驯服性能 |
时间同步时间 |
<10s |
|
|
频率驯服时间 |
<30min |
||
|
1PPS跟踪偏差 |
零基线互比,24h峰峰值 |
<5ns |
|
|
10MHz跟踪偏差 |
零基线互比,24h平均值 |
<1E-12 |
|
|
保持性能 |
1PPS保持 |
常温环境,开机预热及驯服3h后测试 |
<0.5μs/1h <5μs/1d <30us/3d |
|
10MHz频率漂移率 |
开机1d后测试 |
<5E-11/日 |
|
|
频率复现性 |
关机48h后开机稳定后测试 |
<3E-10 |
|
|
频率温度特性 |
正常工作温度范围 |
<1E-9 |
|
|
状态监控 |
LED指示 |
电源、锁定状态 |
|
|
BITE电平输出 |
锁定状态 |
||
|
UART串口监测 |
3.3V CMOS 电平 115200 bps ASCII文本监测 |
||
|
|
输入电压 |
DC 12V ±3V |
|
|
稳定功耗 |
<2W(常温25℃) |
||
|
最大功耗 |
<8W |
||
|
环境适应性 |
工作温度范围 |
-40℃~70℃ |
|
|
存储温度范围 |
-40℃~85℃ |
||
|
振动 |
对振动不敏感 |
||
|
外观结构 |
模块尺寸 |
60mmX70mm,H < 20mm |
|
|
重量 |
<100g |
||
7 连接器定义
|
连接器标识 |
型号规格 |
端子号 |
网络标记 |
定义说明 |
|---|---|---|---|---|
|
X1 |
单排2.54mm间距孔径1.2 mm焊盘 |
1 |
GND |
GND |
|
2 |
VCC |
电源+12V |
||
|
3 |
||||
|
4 |
GND |
GND |
||
|
X2 |
MMCX-KE-Z |
1 |
ANT-IN |
GNSS天线输入 |
|
X3 |
MMCX-KE-Z |
1 |
RF-OUT |
10MHz输出 |
|
X4 |
MMCX-KE-Z |
1 |
1PPS-OUT |
1PPS输出 |
|
X5 |
MMCX-KE-Z |
1 |
REF-1PPS |
GNSS 1PPS输出 |
|
X6 |
DC 2.54 2X5P 间距插座 |
1 |
BTM UART -Tx |
主板串口发送 |
|
2 |
- |
备用 |
||
|
3 |
BITE |
H锁定,L未锁定 |
||
|
4 |
BTM UART-Rx |
主板串口接收 |
||
|
5 |
GND |
|
||
|
6 |
STATE |
控制输入:H跟踪,L保持 |
||
|
7 |
GNSS-UART2-Tx |
备用 |
||
|
8 |
GNSS-UART1-Tx |
GNSS模块串口输出(NEMA ) |
||
|
9 |
GNSS-UART2-Rx |
备用 |
||
|
10 |
GNSS-UART1-Rx |
GNSS模块外部配置输入 |
||
|
X7 |
单排2.54mm间距孔径1.2 mm焊盘 |
1 |
1PPS-In1 |
外部1PPS输入 |
|
2 |
GND |
GND |
